The model improvement functionality uses the new and improved Artificial Intelligence (AI) based algorithm optimization technique that proves to be superior to FIR (Finite Impulse Response), ARMAX (Auto Regressive Moving Average Models with Exogenous Inputs) Box Jenkins methods, which are commonly used by all other competitors including Honeywell, Aspen, Emerson, Yokogawa, MathWorks – all process control design, DCS vendors and PLC vendors. It is capable to automatically identify one or several unmeasured process disturbances, isolate their pattern, display as a trend, and save in the Excel. Works well admits fast random noise, medium frequency drifts and slow unmeasured disturbances.
All mentioned options above reduce intrusive and time-consuming plant step-tests and save the plant of running in undesirable conditions.
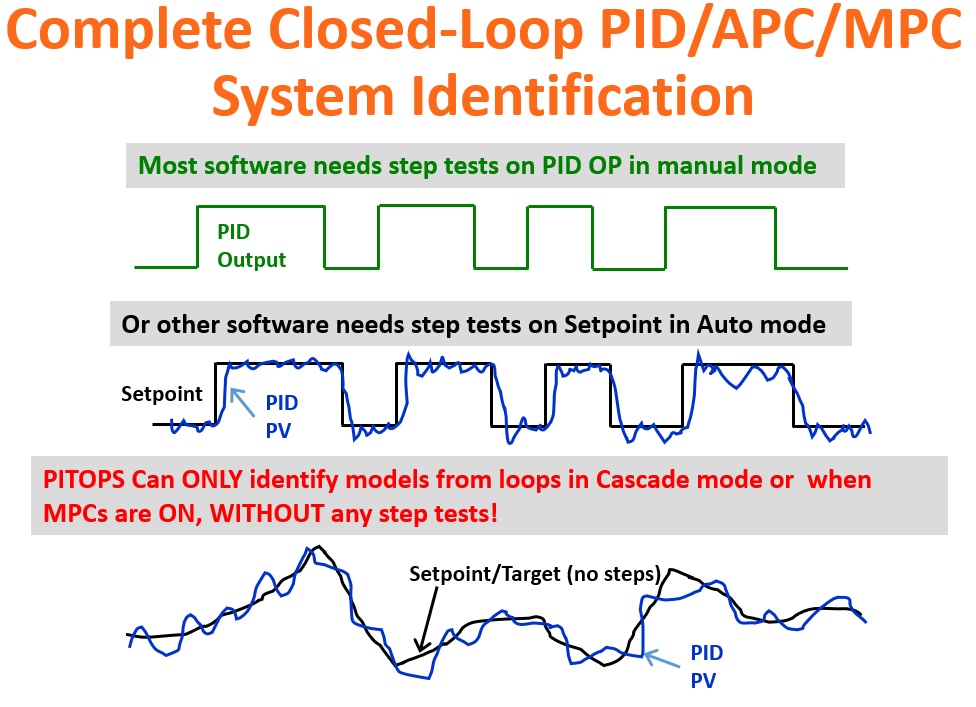
On the other hand, engineers still like to use not so effective old fashion PID tuning rules, where they need to conduct many time-consuming and intrusive plant step-tests, break a control chain, switch control loop modes, and eventually hope that during step-testing time plant will not be hit by unmeasured disturbance which will disturb the plant and ruin performing plant step-tests.
Also, each PID control loop has its own purpose and objective. The optimal tuning of critical loops must consider the nature of the process, how fast the control valve can be allowed to move, the nature of known and unknown disturbances and other customs issues. In any industrial plant there are PID control loops which:
- Do not change their setpoints regularly (mostly barely)
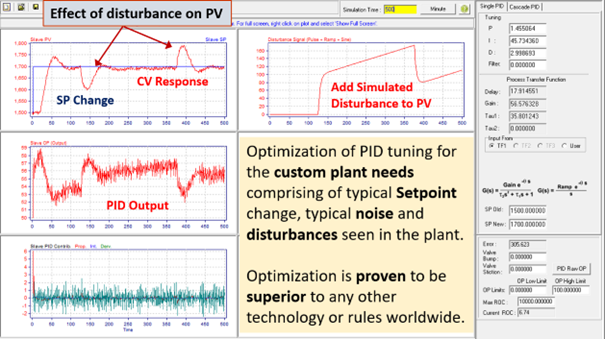
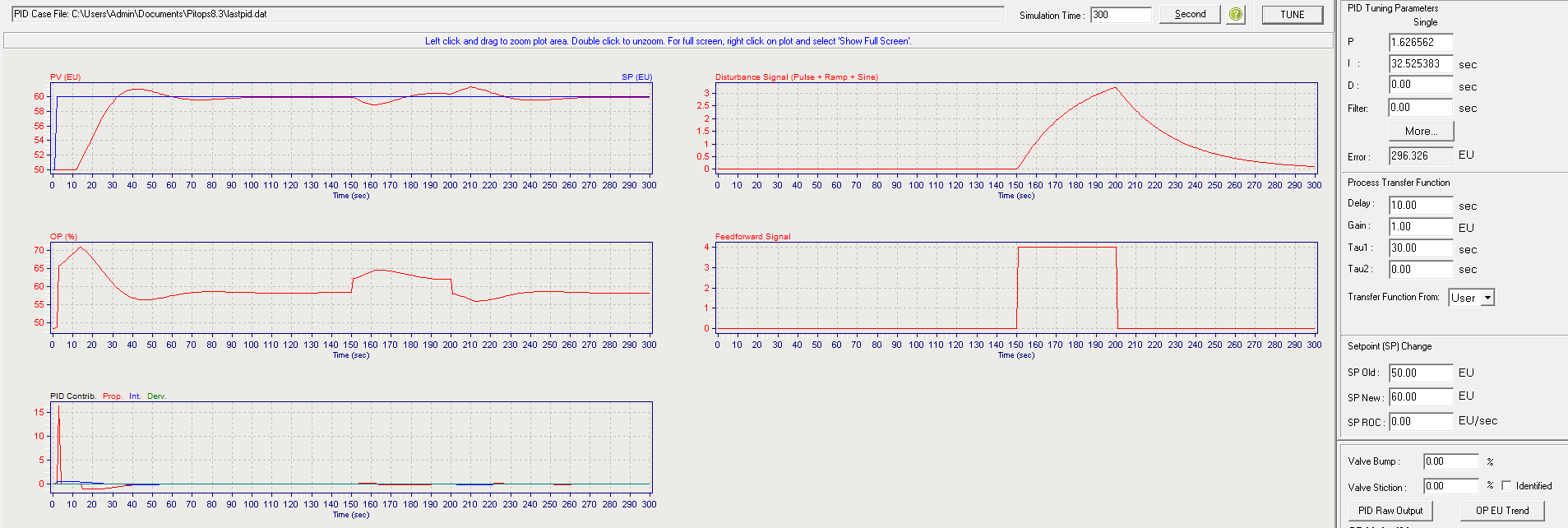
- PID loops which have continuous and dominant disturbances
- PID loops which have complex setpoint trajectory changes (like all Cascade PID loops)
- PID loops which have valve issues
- PID loops which valves cannot be changed abruptly since it may cause some serious downstream upsets
Therefore, it is unreasonable to tune all PID control loops only based on the step setpoint change, like many tools do. This simplified PID tuning on a typical step setpoint change many times will produce poor PID control loop behavior sudden and unexpected process disturbances rejection, and/or control valve mechanical issues.