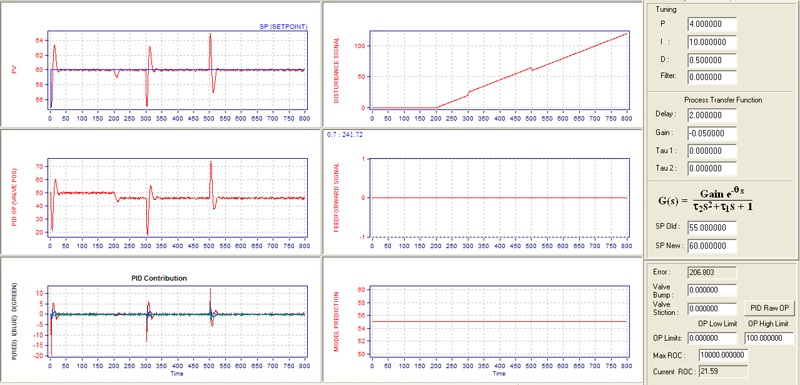
The optimal tuning of critical loops must take into account the nature of the process, how fast the control valve can be allowed to move, nature of known and unknown disturbances and other custom issues unique to the loop. Pitops-PID allows you to configure a custom simulation quickly and easily.
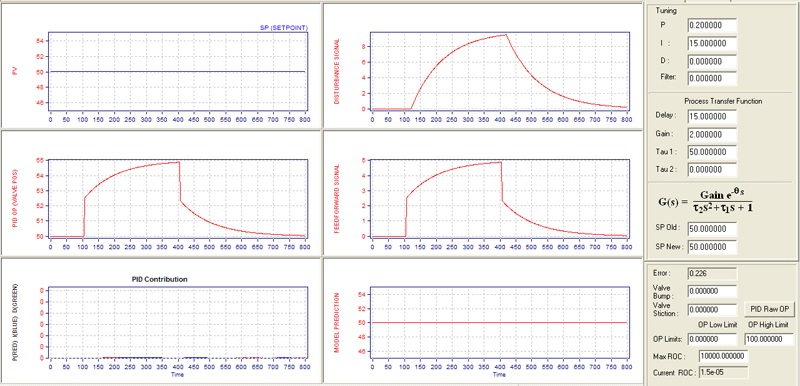
Figure 2 shows a simulation comprising of superimposed disturbances like those seen in the real process. After configuring the disturbances, Pitops-PID optimizes the tuning parameters based on the custom simulation, taking into account the control needs of the loop, which include the following:
1. Typical setpoint changes
2. Typical disturbances
3. Output rate of change consideration
4. Any other custom needs specific to the PID loop
5. Optimize PID tuning to handle control valve stiction or deadband
Most other products optimize tuning based on heuristics and error criteria; in contrast, Pitops-PID optimizes based on the precise (custom) process characteristics and control objectives.